This page lists some passive dynamic walkers built in my lab. The essence of building a robot is to use it as a tool to explore the mechanics of its locomotion or demonstrate the ideas. If you are interested in finding out more about anything you see here or are considering pursuing graduate studies in any of these areas please contact Dr. Christine Wu.
| 2010 |
 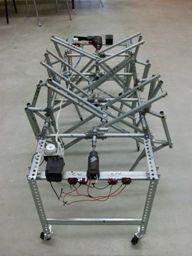 |
The above is a 3-pair (6-leg) walking mechanism designed and built by Mr. Daniel
Giesbrecht. The type synthesis is identifcal to the "Wind Beast" created by the Dutch kinetic sculptor, Mr. Theo Jansen. We designed it using the mechanism design theory and optimization to minimize the energy input. Here are three video clips ( 1, 2 and 3). |
 |
|
| 2009 |
 |
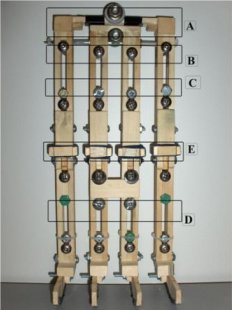
The fourth kneed passive dynamic walker was designed and built by Mr. Derek Koop. It can walk on the treadmill for 1500 steps and we have compared the gait of the above walker walking on the ramp and on a treadmill. The results are presented on this poster. The We are going to use this walker for experimental research of passive dynamic gait and its stability. |
|
| 2008 |
|
The third kneed passive dynamic walker was refined by Mrs. Derek Koop and Dean Ferley. It is used to study the effects of the changes in the lengths of the thighs and shanks on the gait patterns. Here is a presentation at the 2008 North Central ASABE/CSBE Conference, and here is a poster presented at 2008 NSERC Undergraduate Poster Competition.
|

|
A passive dynamic quadruped which can trott was built by Mr. Mathew Nesbitt. To the best of our knowledge this is the first passive quadruped built in the world. We later added two sets of knee joints, but can only make it walk for one step. If you have any suggestions on how to make the kneed passive quadruped walking or you know any passive quadrupeds built, let us know. Here is a poster presented at 2008 NSERC Undergraduate Poster Competition. |
|
| The second kneed passive dynamic walker, Dexter, was designed based on Jie's work, by Mrs. Andrew Greaves and Ian Lohrenz. It was used to study the effects of the changes in the ramp angle and mass distributions of the thighs and shanks on the gait patterns (the poster presented at the conference Dynamic Walking 2008). |
2007 |
|
The first kneed-passive dynamic walker, built by Mr. Jie Chen in my lab in 2007. It was used to study the effects of the changes in the ramp angle and mass distributions of the thighs and shanks on the gait patterns. Here is a poster presented at the conference Dynamic Walking 2008. |
2004 |
|
First passive straight-legged bipedal walker with flat feet was built in my lab by Mr. Nabil Sebat in 2004. It was used to study the effects of ramp angles, friction between the feet and the ramp, and the size of the flat feet on the gait patterns (PDF).
|
|
|